总览
本文使用 linux-2.6.22.6 内核, 使用jz2440开发板.
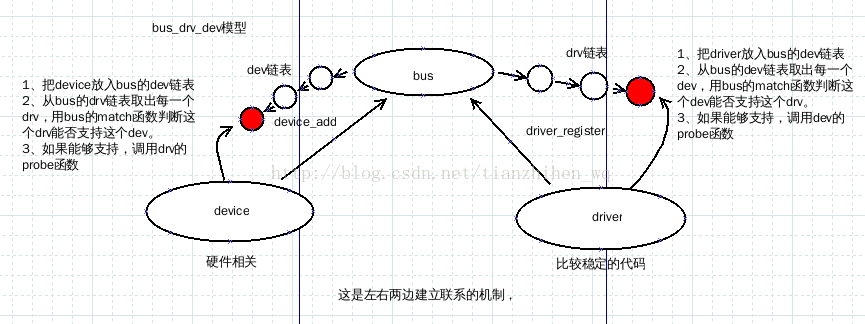
platform 的主要作用是给开发人员搭好了框架.
便于将底层驱动的通用部分放在 driver 端实现, 而硬件高度相关部分放在 device 端实现.
由于只是架构, 因此这里 driver 和 device 两个部分都是自己写代码实现的, platform自动完成匹配.
这种架构特别适用于总线设备! 将总线设备的共性提炼成 driver 文件.
而正对支持总线的不同硬件, 分别单独写 device 即可.
因此一般情况下, platform的driver对应多个device.
linux基于platform的概念, 已经帮我们实现了常用总线的driver如: I2C, SPI, USB等
要更细致的了解linux platform 分离分层的概念, 建议参考如下博文:
源码
LinK+软件也支持配置platform设备, 但是生成的源码放在了同一个文件, 不便于理解.
为了便于理解, 采用点led来说明platform概念. 为保持代码简介, 忽略错误判断, 不支持多个device.
实际开发中, 自己用到platform的机会不多, 因为linux已经将常用的总线写好了.
led_driver.c (硬件通用代码)
#include"led_platform.h"
MODULE_LICENSE("GPL");
MODULE_AUTHOR("DRAAPHO");
int led_major=0;
struct class *led_class=NULL;
volatile unsigned long *gpio_con;
volatile unsigned long *gpio_dat;
int pin;
static int led_driver_open(struct inode *inode, struct file *file)
{
PINFO("led_driver_open\n");
*gpio_con &= ~(0x3<<(pin*2));
*gpio_con |= (0x1<<(pin*2));
return 0;
}
static ssize_t led_driver_write(struct file *file, const char __user *buf, size_t count, loff_t * ppos)
{
int val;
PINFO("led_driver_write\n");
copy_from_user(&val, buf, count);
if (val == 1)
*gpio_dat &= ~(1<<pin);
else
*gpio_dat |= (1<<pin);
return 0;
}
static int led_driver_release (struct inode *inode, struct file *file)
{
PINFO("led_driver_release\n");
return 0;
}
static const struct file_operations led_fops= {
.owner = THIS_MODULE,
.open = led_driver_open,
.write = led_driver_write,
.release = led_driver_release,
};
static int led_driver_probe(struct platform_device *pdev)
{
struct resource *resource;
PINFO("led_driver_probe\n");
resource = platform_get_resource(pdev, IORESOURCE_MEM, 0);
gpio_con = ioremap(resource->start, resource->end - resource->start + 1);
gpio_dat = gpio_con + 1;
resource = platform_get_resource(pdev, IORESOURCE_IRQ, 0);
pin = resource->start;
return 0;
}
static int led_driver_remove(struct platform_device *pdev)
{
iounmap(gpio_con);
PINFO("led_platform_remove\n");
return 0;
}
struct platform_driver led_driver = {
.driver = {
.name = DRIVER_NAME,
.owner = THIS_MODULE,
},
.probe = led_driver_probe,
.remove = led_driver_remove,
};
static int __init led_driver_init(void)
{
PINFO("led_driver_init\n");
led_major = register_chrdev(0, DRIVER_NAME, &led_fops);
led_class = class_create(THIS_MODULE, DRIVER_NAME);
class_device_create(led_class, NULL, MKDEV(led_major, 0), NULL, "led");
platform_driver_register(&led_driver);
return 0;
}
static void __exit led_driver_exit(void)
{
platform_driver_unregister(&led_driver);
class_device_destroy(led_class, MKDEV(led_major, 0));
class_destroy(led_class);
unregister_chrdev(led_major, DRIVER_NAME);
PINFO("led_platform_exit\n");
}
module_init(led_driver_init);
module_exit(led_driver_exit);
|
led_device.c (硬件专用代码)
#include"led_platform.h"
MODULE_LICENSE("GPL");
MODULE_AUTHOR("DRAAPHO");
struct resource led_devs_res1[] = {
{
.start = 0x56000050,
.end = 0x56000050 + 8 - 1,
.flags = IORESOURCE_MEM,
},
{
.start = 5,
.flags = IORESOURCE_IRQ,
},
};
static void led_dev_release(struct device * dev)
{
PINFO("led_dev_release\n");
}
struct platform_device led_devs1 = {
.name = DRIVER_NAME,
.resource = led_devs_res1,
.num_resources = ARRAY_SIZE(led_devs_res1),
.id = 0,
.dev = {
.release = led_dev_release,
},
};
static int led_dev_init(void)
{
PINFO("led_dev_init\n");
platform_device_register(&led_devs1);
return 0;
}
static void led_dev_exit(void)
{
platform_device_unregister(&led_devs1);
PINFO("led_dev_exit\n");
}
module_init(led_dev_init);
module_exit(led_dev_exit);
|
#define DRIVER_NAME "led_platform"
#define PDEBUG(fmt,args...) printk(KERN_DEBUG"%s:"fmt,DRIVER_NAME, ##args)
#define PERR(fmt,args...) printk(KERN_ERR"%s:"fmt,DRIVER_NAME,##args)
#define PINFO(fmt,args...) printk(KERN_INFO"%s:"fmt,DRIVER_NAME, ##args)
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/interrupt.h>
#include <linux/platform_device.h>
#include <linux/slab.h>
#include<linux/cdev.h>
#include<linux/device.h>
#include<linux/fs.h>
#include<linux/init.h>
#include<linux/interrupt.h>
#include<linux/kdev_t.h>
#include<linux/module.h>
#include<linux/types.h>
#include<linux/uaccess.h>
#include <asm/uaccess.h>
#include <asm/io.h>
|
led_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
int main(int argc, char **argv)
{
int fd;
int val = 1;
fd = open("/dev/led", O_RDWR);
if (fd < 0) {
printf("can't open!\n");
}
if (argc != 2) {
printf("Usage :\n");
printf("%s <on|off>\n", argv[0]);
return 0;
}
if (strcmp(argv[1], "on") == 0) {
val = 1;
} else {
val = 0;
}
write(fd, &val, 4);
return 0;
}
|
Makefile
TEST_FILE := led_test
obj-m += led_driver.o
obj-m += led_device.o
KERN_SRC := /home/draapho/share/jz2440/kernel/linux-2.6.22.6/
PWD := $(shell pwd)
modules:
make -C $(KERN_SRC) M=$(PWD) modules
install:
make -C $(KERN_SRC) M=$(PWD) modules_install
depmod -a
clean:
make -C $(KERN_SRC) M=$(PWD) clean
rm -f $(TEST_FILE)
test:
arm-linux-gcc $(TEST_FILE).c -o $(TEST_FILE)
|
测试
$ make clean
$ make modules
$ make test
$ insmod led_driver.ko
led_platform:led_driver_init
$ insmod led_device.ko
led_platform:led_dev_init
led_platform:led_driver_probe
$ ./led_test on
led_platform:led_driver_open
led_platform:led_driver_write
led_platform:led_driver_release
$ ./led_test off
led_platform:led_driver_open
led_platform:led_driver_write
led_platform:led_driver_release
$ rmmod led_device.ko
led_platform:led_platform_remove
led_platform:led_dev_release
led_platform:led_dev_exit
$ rmmod led_driver.ko
led_platform:led_platform_exit
|
参考资料